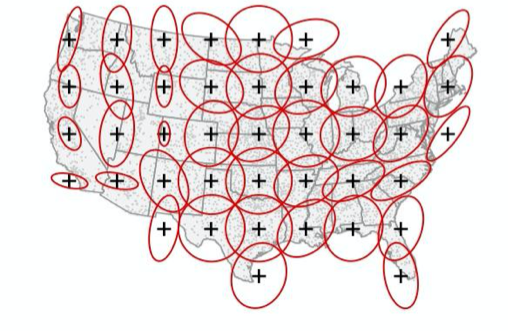
Fits convolution-based nonstationary Gaussian process models to point-referenced spatial data via local likelihood techniques. Also provided are functions to fit stationary spatial models for comparison, calculate the kriging predictor and standard errors, and create various plots to visualize nonstationarity.
Available on GitHub at https://github.com/cran/convoSPAT